Attention
This tutorial is deprecated.
Please reference the official Isaac ROS Docs Site to get the latest information and the quickstart guide on isaac_ros_visual_slam.
Jetson Isaac ROS Visual SLAM Tutorial
This site provides a tutorial documentation for running Isaac ROS Visual SLAM on Jetson device.
What you will find in this tutorial
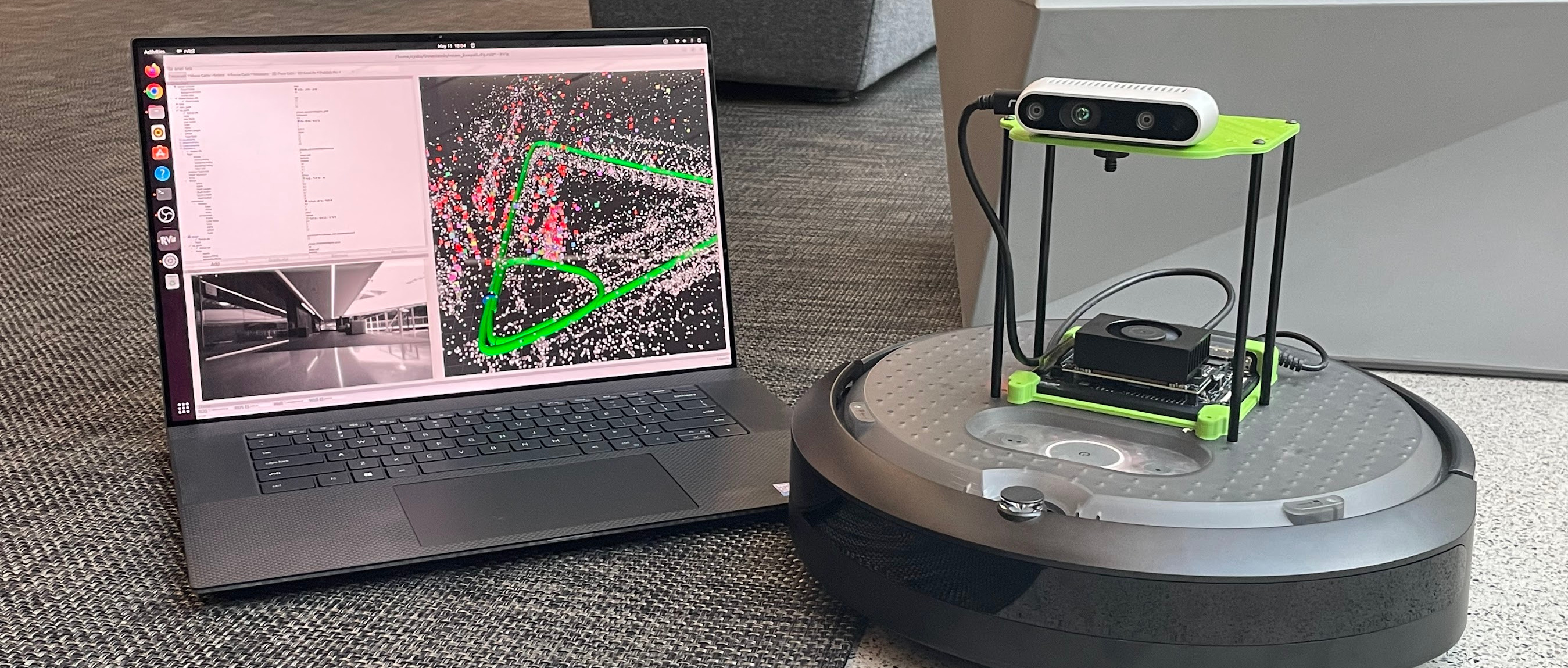
This tutorial shows a quick and easy way to run Isaac ROS Visual SLAM with Intel RealSense camera on Jetson Orin Nano Developer Kit.
It comes with a custom SD card image pre-configured with Isaac ROS software and other tools, enabling the shortest path to evaluate Isaac ROS Visual SLAM on a physical setup.
Jump into the Quickstart page to learn how you can set up your environment to test Isaac ROS Visual SLAM.
Example video
What is Isaac ROS Visual SLAM
NVIDIA offers Isaac ROS Visual Visual SLAM, best-in-class ROS 2 package for VSLAM (visual simultaneous localization and mapping), on its GitHub repo.
It takes stereo camera images (optionally with IMU data) and generate odometry output, along with other visualization and diagnostics data.
graph LR
A[Intel RealSense D435i]
B[VSLAM]
C[other ROS 2 nodes]
A -- L + R camera frame <br>IMU --> B
B -- Odometry --> CDetail specs of Isaac ROS Visual SLAM
See the official repo README.md (Accuracy, Performance)
Change log
| Date | Description |
|---|---|
| 05-15-2023 | Initial version released |