Linux PC setup
Ubuntu setup
- Install Ubuntu 22.04
Install NVIDIA driver
Official Isaac ROS Documentation - Isaac Sim Driver Requirements
sudo apt-get install nvidia-driver-525
Isaac Sim setup
Install Omniverse Launcher
Download Omniverse Launcher
Install Omnivese Launcher
sudo apt install libfuse2
chmod +x ./omniverse-launcher-linux.AppImage
./omniverse-launcher-linux.AppImage
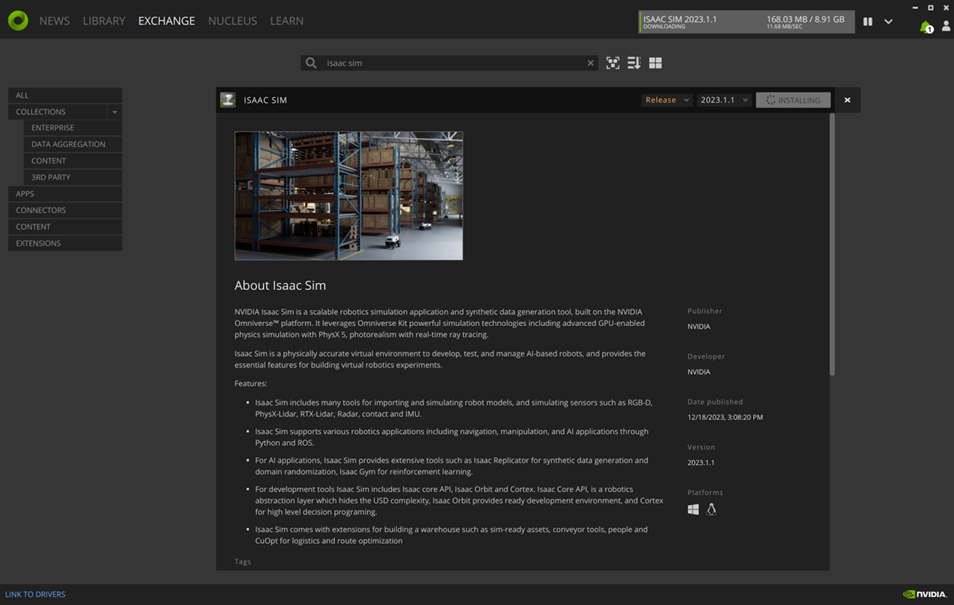
Install Isaac Sim
Official Isaac ROS Documentation - Workstation Installation
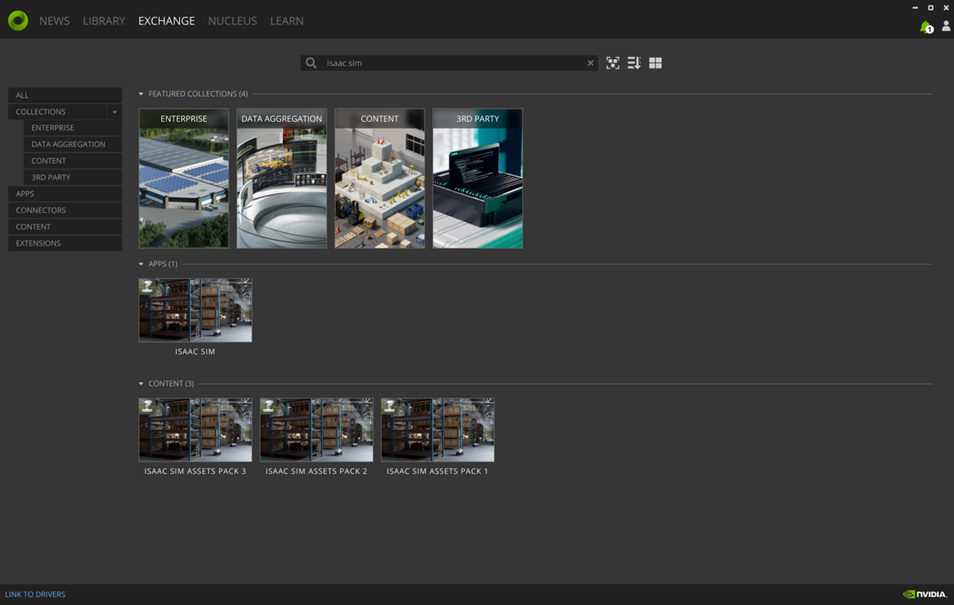
Install Release 2023.1.1.
Foxglove setup
Install Foxglove
Download and install.
wget https://get.foxglove.dev/desktop/latest/foxglove-studio-1.87.0-linux-amd64.deb
sudo apt install ./foxglove-studio-*.deb
Install the ROS bridge
source /opt/ros/
sudo apt install ros-$ROS_DISTRO-foxglove-bridge
Save pre-made layout config locally
Start the Foxglove Bridge
ros2 launch foxglove_bridge foxglove_bridge_launch.xml
Then start the Foxglove Studio from GUI or CUI.
foxglove-studio
Click on "Open connection"
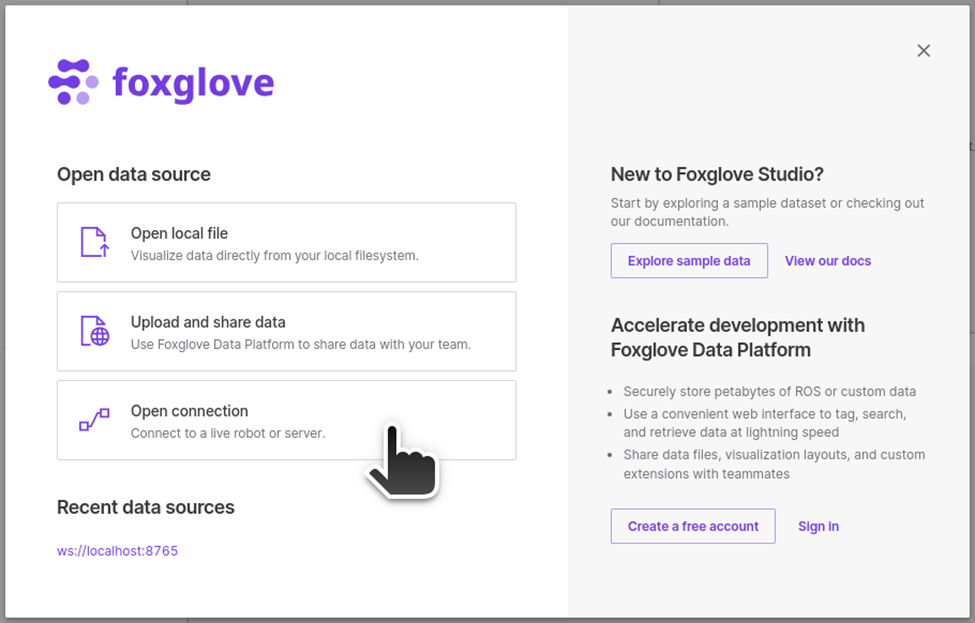
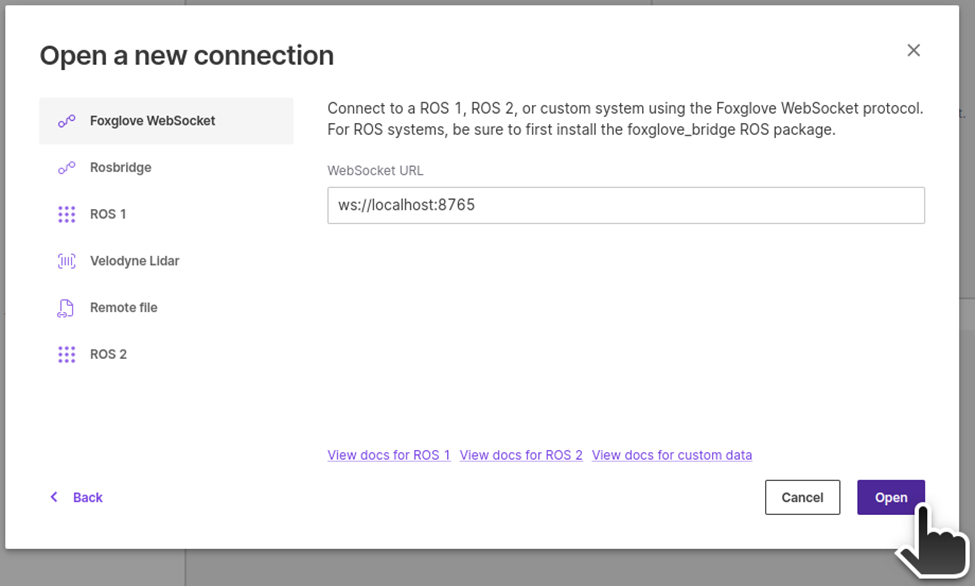
Select "Foxglove WebSocket", leave the WebSocket URL as ws://localhost:8765 and click on "Open".
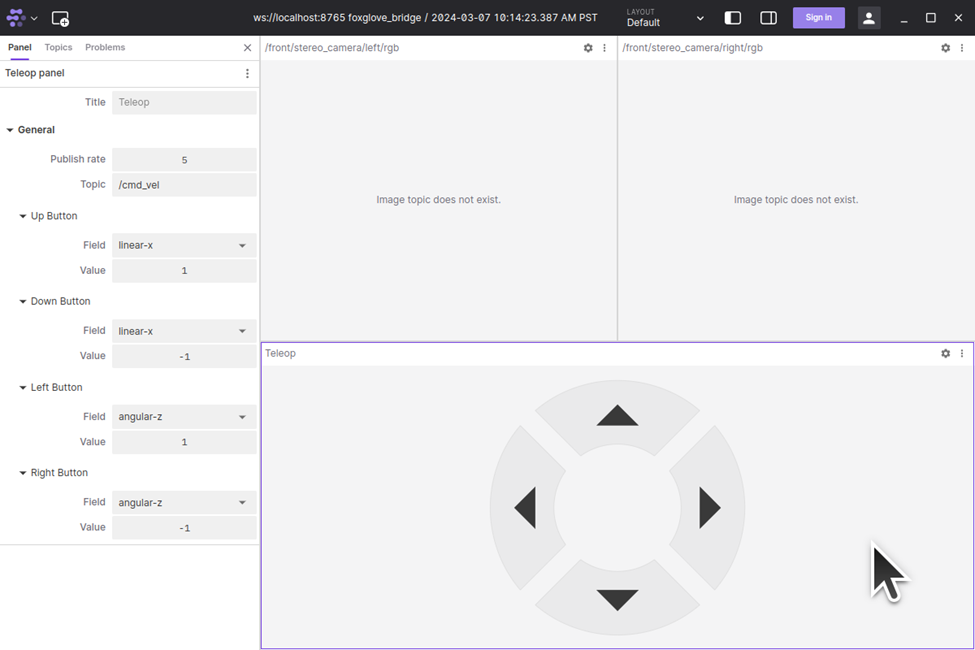
For viewing the camera images published, and controlling the robot by publishing /cmd_vel messages, you can setup a layout like this to enable "FPV tele-operation".
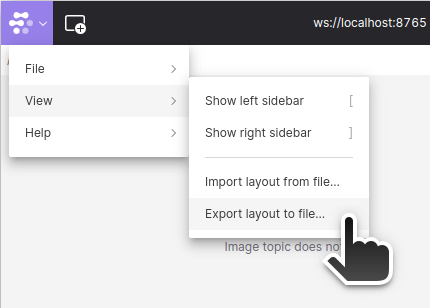
Save the layout config to a local file for use later.
Click the Foxglove icon at the top left corner, select View > Export layout to file ....
Name it foxglove_fpv_layout.json or something appropriate and save it under the home directory.